

Cet adaptateur USB n'est utilisable que pour les servos programmables ABSIMA portant la mention SMART SERVO.
Convient aux servos programmables Absima suivants :
ST23DBF Team Spec.
ST50DBT Team Spec.
LP16DBF Team Spec.
LP20DBT Team Spec.
ST18DBF Race Spec.
ST40DBT Race Spec.
LP15DBF Race Spec.
LP19DBT Race Spec.
LP34DBT Crawler Spec.
ST62DBFT Crawler Spec.
Exigences du système
1. tension de fonctionnement : USB(5V/500mA).
2. système d'exploitation : Windows XP/Windows Vista/Windows 7/Windows 8/Windows10 ( 32/64bit).
3. application : servos ABSIMA programmables avec marquage "SMART SERVO".
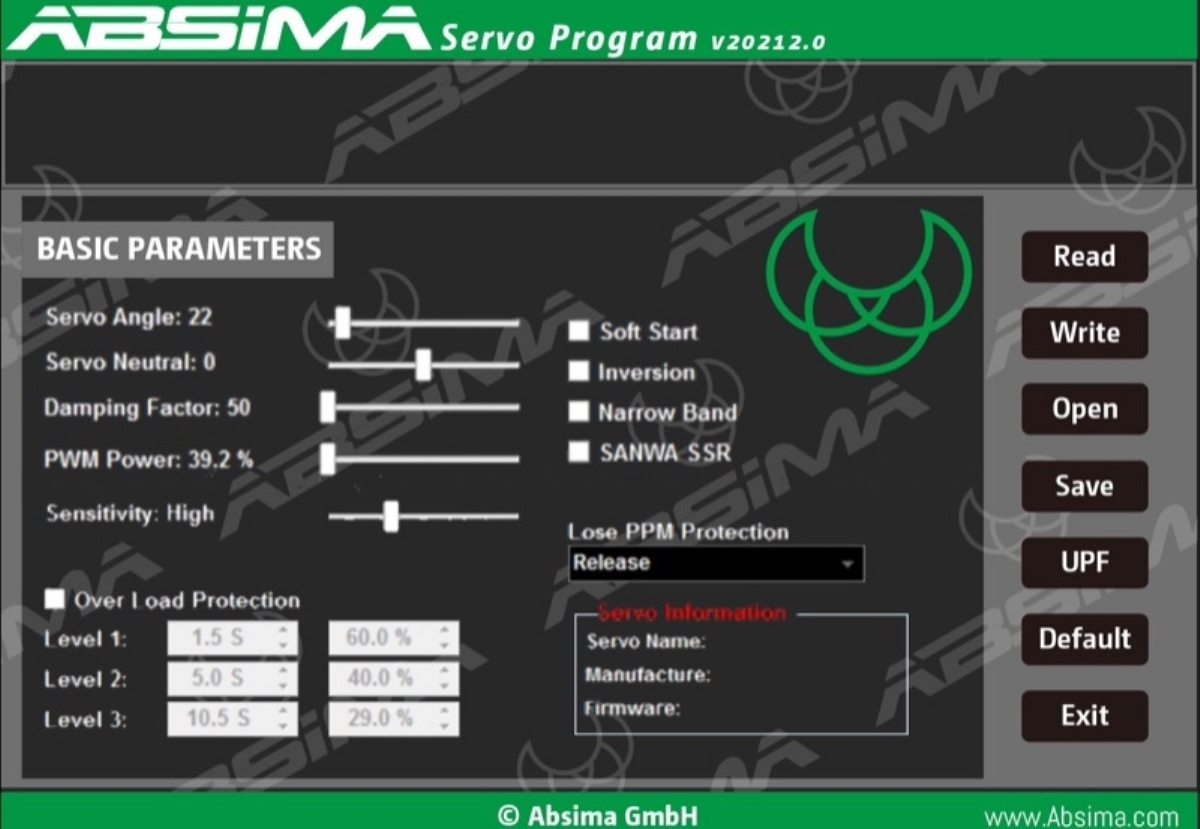
Réglages des paramètres :
1. angle du servo : réglage de l'angle de rotation du servo.
2. position neutre du servo : réglage de la position neutre du servo Remarque : si l'émetteur tourne en position neutre et que la
le servo ne reste pas dans la position correspondante, il est possible de modifier cette valeur pour ajuster le cornet du servo. Cette
équivaut à régler le trim du canal de l'émetteur.
3. puissance PWM : réglez la puissance de sortie du servo. Plus la puissance est élevée, plus le couple et la vitesse du servo sont élevés.
la vitesse, mais la consommation de courant est également plus élevée.
4. facteur d'amortissement : réglez l'amortissement du servo.
5. sensibilité : réglez la zone morte (sensibilité) du servo.
6. démarrage en douceur : rétablissement lent lors de la mise sous tension du servo. Dès que le servo est mis sous tension, il tourne
en douceur dans la position du signal d'entrée actuel. Remarque : cette fonction sert à éviter les dommages dus à un montage incorrect du servo.
du servo lors de la mise sous tension.
7. inversion : réglage de la rotation normale et inversée du servo.
8. bande étroite : mode FUTABA SR
9. SANWA SSR : mode SANWA SSR. Remarque : activez cette fonction pour pouvoir utiliser le mode SANWA SSR à grande vitesse.
Prise en charge du mode haute vitesse. L'angle du servo peut ne pas être précis, il faut le régler à nouveau.
10. protection contre la perte de PPM : protection contre la perte de signal, il y a trois fonctions au choix :
a. Validation : non protection
b. Maintenir la position : Reste dans la position avant la perte de signal
c. Prendre la position neutre : Revenir à la position neutre (position 1500uS).
11. protection contre les surcharges : réglez la protection contre le blocage des servos. Il y a trois niveaux qui sont activés en cochant la case :
Niveau 1 : Réglez l'heure de démarrage et la valeur de puissance de la protection primaire.
Étape 2 : Régler l'heure de démarrage et la valeur de puissance de la protection secondaire.
Étape 3 : régler l'heure de démarrage et la puissance de la protection tertiaire.
Remarque : le côté gauche sert à régler le temps de démarrage de la protection, le côté droit à régler la puissance de sortie après l'activation de la protection.
activation de la protection au démarrage.
12. informations sur le servo : Informations sur le servo. Y compris le modèle de servo, la date de version, le nom du firmware.
Nom du servo : modèle de servo.
Fabrication : date de la version du servo
Firmware : nom du firmware du servo